机器人灵巧手
机器人灵巧手简称灵巧手,是一种具有类似人手结构和功能的机器人末端执行器。基本特征是至少具有3个手指,每指至少具有3个
轴线不完全平行的自由度,通常灵巧手还集成力觉、视觉等多种传感器。
灵巧手能稳定抓持形状各异的物体,并对其进行灵活操作。灵巧手还是与外部环境沟通的桥梁,传感器系统可以获得目标物体的位
置、大小、轻重、软硬等相关信息,从而有效提高机器人的自主决策能力。其潜在的用途在于极限或有害环境下替代人类执行任务,
如太空、水下及核辐射环境等。
灵巧手自由度减少,结构简化后成为机械手,功能也相对较弱,可用于工业场合夹持工件,也可用于人体假肢和人形机器人。
如图1所示,自主开发的仿人形灵巧手。其设计指标如下:
1) 采用仿人手布局,具有5指11自由度,尺寸小于人手1.5倍,重量小于2.5Kg;
2) 手指端法向捏紧力大于10N,手指单关节运行速度大于1rad/s;
3) 拇指、食指和中指指端具有6维力/矩传感器,主动关节轴装有电位计测量转角;
4) 单指设计模块化直流伺服驱动电机藏于手指或手掌内,内部走线。
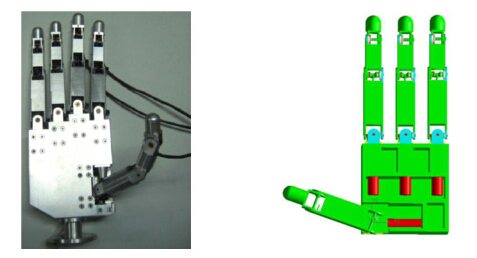
如图2所示,四指仿人形灵巧手三维模型。此型灵巧手仿照德国DLR-II设计,共有四个手指12个自由度。具有完备的设计图纸,
可在较短时间内提供样机。
如图3所示,五指灵巧手抓持典型物体仿真。
图3 五指灵巧手抓持典型物体仿真
如图4所示,两自由度机构结构示意图。指掌关节结构设计是研制仿人形灵巧手样机的重要一环。自主研发的用于指掌关节的两
自由度机构,具有国际领先的科技水平。此机构对同类仿生关节设计具有重要参考价值。
图4 两自由度关节机构结构示意图