一、需求分析
根据用户方对于多盘抓取系统的实际需要,提出需求有如下:
1、机柜能容纳1万张容量为100GB的光盘,总存储容量达到1PB;
2、柜内光盘按照12张为一套存放,并至少有12个光驱可用,还可以按12个一组扩展到84个光驱;
3、抓取12张光盘并分盘到12个光驱内部所用时间必须小于等于72秒;
4、柜子必须具备方便搬运、移动的特点;
5、抓取光盘与分盘必须可靠,稳定,安全,设计寿命为5年;
6、柜子的制造成本需要在72万元人民币以内;
7、机柜尺寸要求为深1.2米,高2.3米,宽600毫米;
二、总体方案设计
由于开发周期限制,决定在转笼机构的单盘抓取系统的基础之上,改进为可操作12张盘的抓取系统,其结构原理图如下所示。
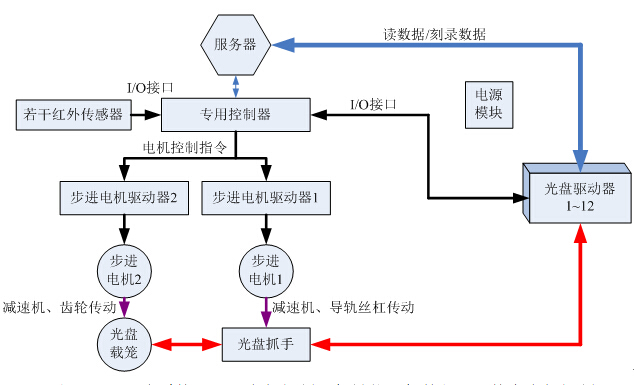
从上图可知,该系统主要由电气控制和机械执行机构组成,其中电气控制主要由以下几部分组成,上层服务器(包括固态硬盘),电源模块,专用控制器,步进电机驱动器,传感器;机械执行机构主要由下面这几部分组成:导轨丝杠,光盘转笼以及转笼上的传动齿轮,转笼操作辅助立柱,步进电机,减速机,光盘抓手。其中光盘手抓能抓取12张光盘,转笼每个槽能放12张光盘。
三、电气控制功能说明
(一)上层服务器
上层服务器的主要功能有:
1、与用户交互,存储用户数据到光盘中,从光盘中读取数据;
2、与控制器交互,在固态硬盘中没有数据或需要写新数据时,发送指令给控制器,抓取光盘到光驱内;
控制器和服务器通过RS232相互访问,这里以服务器为上位系统,讨论服务器发送给控制器的指令。
服务器发送给控制器的指令:
(1)服务器写数据或读数据所需光盘的位置信息;
(2)放入光驱操作还是移出光驱操作。
(二)专用控制器需要实现的功能介绍
专用控制器是整套电控系统的核心部件,它主要有两个功能。一个是和服务器的通信,另一个是对各个传感器信号的读入和步进电机、光驱的控制。
先说明专用控制器发送给服务器的数据:
(1)报警信号;
(2)各个光驱的状态信号,包括光驱的开合状态;
(3)动作完成信号。
然后介绍的是第二个功能。为了实现具体的功能,专用控制器还需要将服务器发送来的信息转换为实际的操作指令,控制步进电机的运动,光驱的开合,手抓的抓放,并且控制器还能接收各种传感器的信号。
这些控制中,专用控制器对步进电机的运动控制都是按照梯形加减速控制实现的。
根据上述的功能描述,可以确定控制器要有如下接口:
1路RS232的通讯信号;
2路PWM波信号用于控制大功率步进电机;
1路用PWM控制器的小功率步进电机驱动输出;
1路用于控制抓取器的OUT信号;
3路限位开关IN信号;
1路光电传感器检测光盘有无的IN信号;
12*7=84路光驱控制OUT信号以及光驱开合状态IN信号总共168路I/O信号;
为了加速开发设计,核心控制芯片选用本人用的最熟练的TMS320F28335,考虑到上面控制光驱要用到168个I/O接口,故选用Cyclone系列的EP1C12Q240C6(配置:EPCS4)来外扩I/O接口。
(三)步进电机驱动器以及传感器
步进电机驱动器的功能就是将专用控制器的指令信号转化放大为驱动步进电机的大电流脉冲信号。
系统中,会用到两种传感器,一种是光电传感器,一种是接近传感器。光电传感器的作用是检测是否有光盘存在,接近传感器的作用是确定光盘抓手和转笼的运动范围。
(四)电源模块
电源模块包括滤波器和高功率的开关电源,除了服务器,其他电气控制器件都需要电源供电。
四、机械执行功能说明
该系统的的机械部件包括:导轨丝杠,光盘转笼以及转笼上的传动齿轮,转笼操作辅助立柱,步进电机,减速机,光盘抓手。其中最为复杂的部件为光盘转笼和光盘抓手。
(一)光盘转笼
为了满足一个柜子装10000张盘,光盘转笼分为120层,每层都可放置7*12张光盘,每个光盘匣均可单独推出转笼。光盘匣的推出与收回是通过安装在光盘抓手上的顶杆和转笼的旋转运动实现的。
在需要推出光盘匣时,光盘抓手下降一定高度,使安装上面的顶杆和待推出的光盘匣处于同一水平位置,并且待推出的光盘匣在抓手一侧,此时转笼顺时针(从上往下看)旋转,待推出的光盘匣被顶杆顶住,反推出光盘匣,光盘匣再被辅助立柱彻底打开。
收回光盘匣时,只需让转笼逆时针(从上往下看)旋转,被另一根辅助杆顶回转笼内部。
(二)光盘抓手
此系统的光盘抓手除了抓取12张光盘外,还能将12张光盘分次放入12个光驱内,并且能购将12张光盘取出,采用微型的带铁片双丝杠和一个抓取器实现上述功能。其中丝杠上带有铁片,使用小型步进电机驱动,抓取器使用电磁铁驱动。
抓手抓取12张的过程描述:双丝杠旋转使铁片指向外侧,收缩抓取器,并将抓取器伸到光盘内孔,展开抓取器,抬起12张光盘。
抓手将12张盘依次放入光驱的过程描述:旋转丝杠将最底部的光盘和上面的光盘用丝杠上的铁片分开,收缩抓取器,将一张光盘放入光驱中,继续旋转丝杠,让剩下的光盘掉下有抓取器接住,重复上述过程,即可将所有光盘放入光驱中。
抓手依次收回12张光盘的过程:旋转丝杠,使铁片朝向外侧,以便使抓手能将抓取器伸入光盘孔内,抓取器抬上1张光盘,然后用抓取器接近下一个待取光盘,收缩抓取器,将两个光盘一起抬起来,旋转丝杠,使铁片将上一张光盘抬高,之后继续用抓取器抓取两个光盘,使用铁片抬高上一张光盘,实现抓取12张光盘。
五、设备运行过程说明
执行光盘抓取任务,其具体过程如下:
服务器查询其存储的待查数据的对应光盘位置或编号,发送光盘位置或编号给专用控制器,让其进行放入光驱操作,同时存储光盘位置编号和对应光驱编号。
专用控制器接到命令后,控制转笼和光盘抓手运动到指定位置,打开光盘匣,抓手抓取光盘后,将光盘送到光驱上方位置,在抓手到位后,专用控制器打开光驱,抓手将12张光盘依次放入光驱,放完最后一张光盘后,抓手上升到最高位置,收回光驱,发送指令完成信号给服务器,服务器读取数据。
执行光盘放回光盘匣操作任务的具体过程如下:
服务器查询光驱内部的光盘对应的位置或编号信息,将光盘位置或编号发给专用控制器,让其执行移出光驱操作。
专用控制器接到命令后,控制转笼运动到指定位置,光盘抓手运动到指定光驱上方,弹出光驱,抓取光驱里的光盘,收回光驱,将光盘放回转笼内。